INTEGRANTES
Valentina Velázquez Colorado
Estudiante participante en el desarrollo de la página web sobre Lego Spike. Participó en la investigación de información, prácticas y elaboración de actividades relacionadas con programación, motores y sensores.
Alejandra Saray Hernández Narváez
Estudiante participante en el proyecto de Lego Spike. Colaboró en la organización de información, construcción de modelos y desarrollo de ejercicios prácticos con Lego Spike.

INTRODUCCIÓN
La robótica educativa se ha convertido en una herramienta importante para aprender tecnología, programación y resolución de problemas de manera práctica y divertida. Lego Spike es una plataforma creada por LEGO Education que permite construir y programar robots utilizando motores, sensores y piezas LEGO. En esta página se presenta información general sobre Lego Spike, sus componentes principales, sitios para aprender más sobre esta herramienta y algunas prácticas realizadas durante las actividades.
¿Qué es Lego Spike?
Lego Spike es una plataforma educativa de robótica creada por LEGO Education. Combina piezas LEGO, programación y sensores para que los estudiantes aprendan ciencia, tecnología, ingeniería y matemáticas (STEM) de manera divertida e interactiva.
Características de Lego Spike
● Permite construir robots y proyectos interactivos.
● Usa programación por bloques tipo Scratch.
● Incluye sensores y motores inteligentes.
● Ayuda a desarrollar creatividad y resolución de problemas.
● Se puede usar en proyectos escolares y competencias.
Componentes
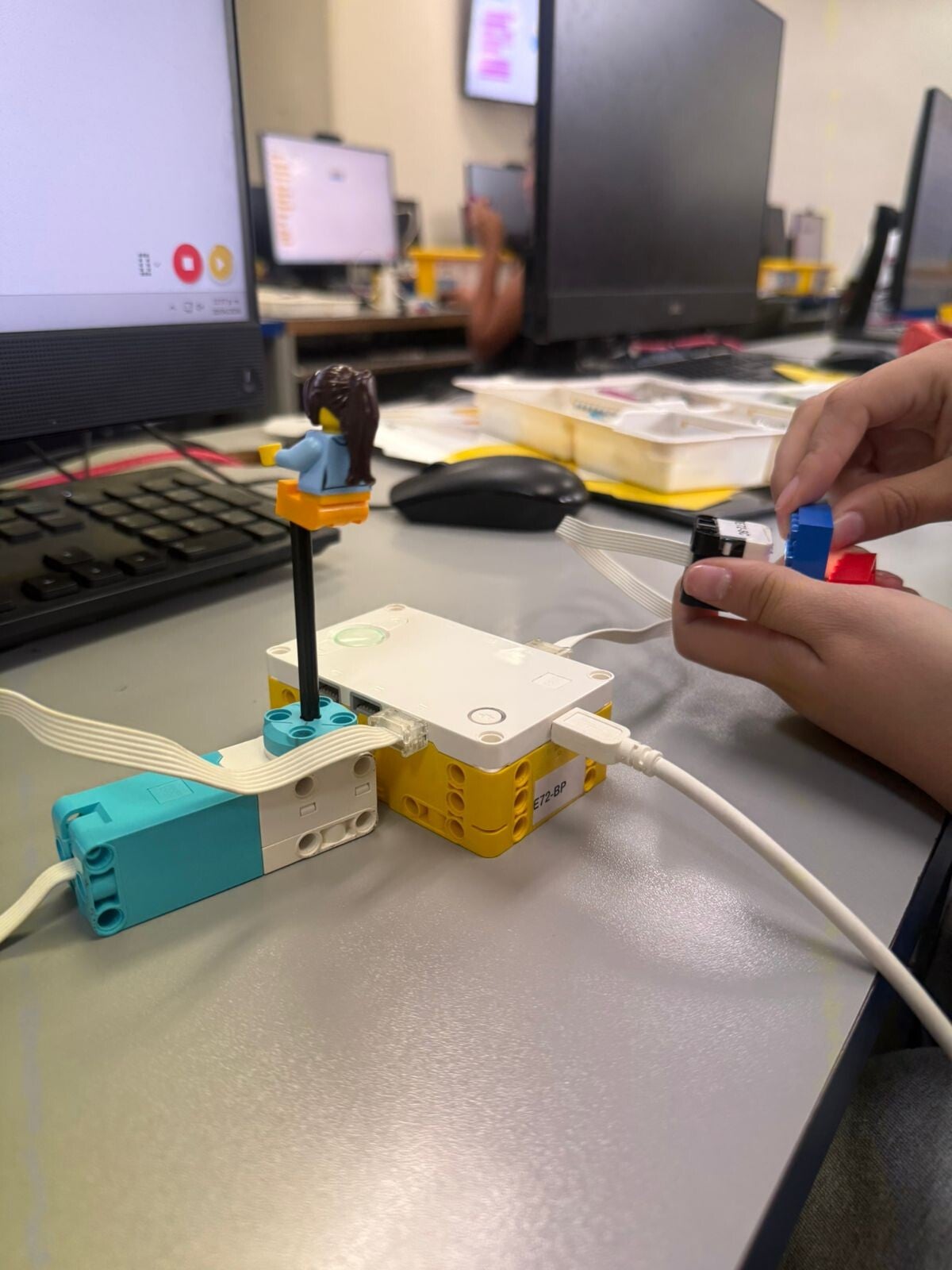
Hub Inteligente
Es el “cerebro” del robot. Controla motores y sensores. Tiene conexión Bluetooth, batería recargable y una pantalla pequeña para mostrar imágenes o emojis.
Motores
Motor mediano
Se utiliza para movimientos rápidos y precisos, como girar ruedas o mover brazos pequeños.
Motor grande
Tiene más fuerza y sirve para mover robots más pesados o realizar movimientos grandes.
Sensores

Sensor de color
Detecta colores y la intensidad de la luz.
Sensor de distancia
Mide qué tan lejos o cerca está un objeto.
Sensor de fuerza
Detecta presión o contacto.
Sitios de interés para aprender Lego Spike

Canal oficial de LEGO Education en YouTube

Tutoriales de programación Lego Spike Prime
Página oficial de LEGO Education Spike

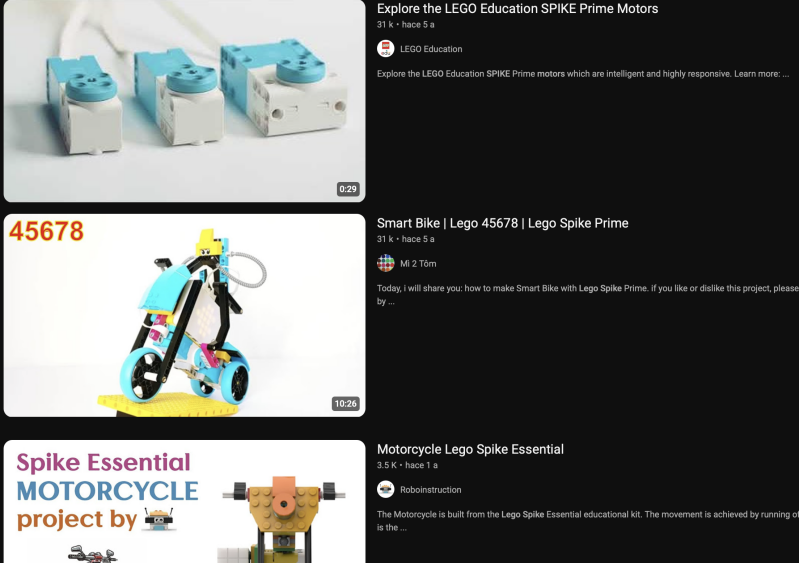
Videos educativos sobre sensores y motores en YouTube
¿Cómo se ve y se trabaja LEGO spike?

Lego Spike está formado por piezas LEGO, sensores, motores y un Hub inteligente que permite construir robots y modelos interactivos.
Se trabaja en tres pasos:
- Construcción: se arma el modelo con piezas LEGO.
- Programación: se crean instrucciones en la aplicación.
- Prueba: se revisa que el robot funcione correctamente.

Preactica 1 (emojis)
En esta primera practica estábamos conociendo y adaptándonos a lego por lo que comenzamos con practicas mas fáciles como los emojis, frases y números en el hub mientras que íbamos conociendo mas funciones de LEGO SPIKE
Practica con ambos motores
En esta parte la practica consistía de hacer funcionar dos motores medianos y uno grande al mismo tiempo, y esto se lograba anclando los motores al hub mediante los cables incluidos, después se ingresaba un código de programación en SPIKE y por ultimo se agregan piezas con las que se logre ver el movimiento de los motores
Practica con sensor de color
Esta practica se usa configurando el sensor de color con el hub y el motor para que al momento de reconocer el color especificado el sensor le haga saber al hub que debe realizar el movimiento
Practica con sensor de distancia
Somos un equipo dedicado a crear experiencias únicas. Nos centramos en ofrecer soluciones fiables e innovadoras, impulsadas por un profundo respeto por la calidad y un deseo auténtico de superar las expectativas.



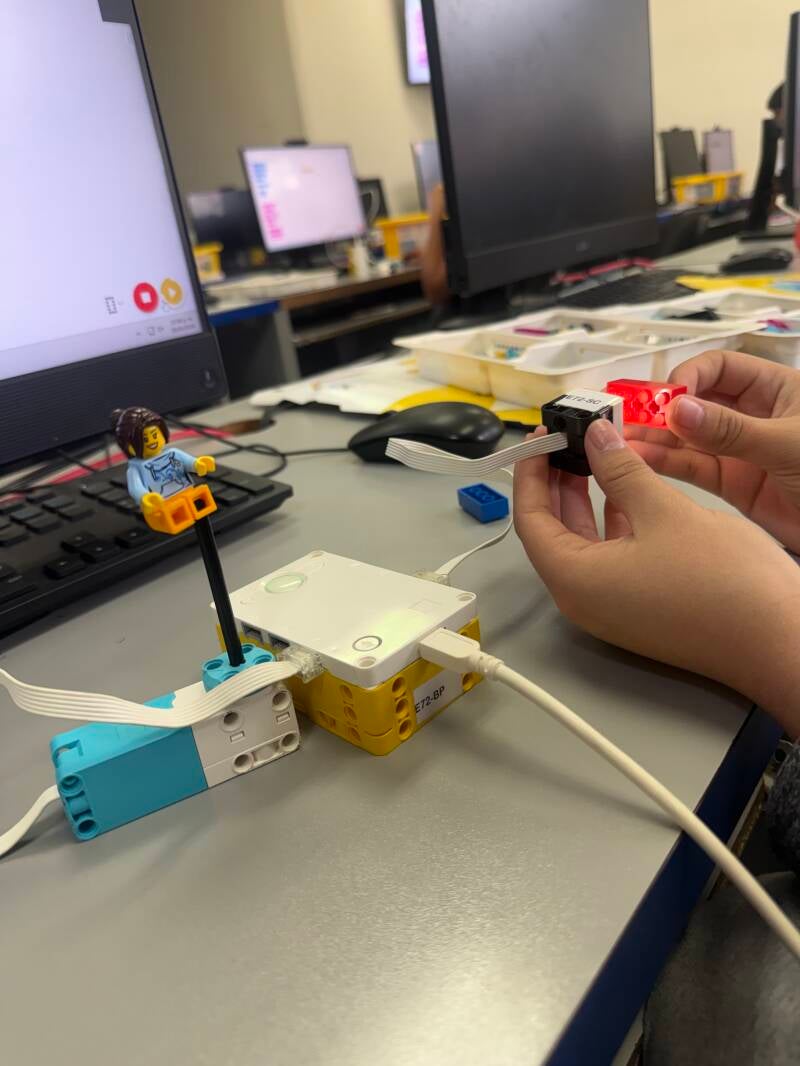
Sensor de fuerza
Los sensores de fuerza son los que funcionan mediante la fuerza que se les aplique a los mismos, estos al tener presión logran que el motor haga su rotación, este al igual que los dos pasados se hace funcionar por medio de su configuración haciendo qie ses uno de los mas dinámicos y didácticos
Saltarín
En esta practica se realizo el primer robot funcional el cual para poder desplazarse realizaba ´pequeños brincos los cuales lograba por medio de motores que al configurarlos hacían funcionar al robot saltarín



Rinoceronte
En esta practica se realizo el primer robot funcional el cual para poder desplazarse realizaba ´pequeños brincos los cuales lograba por medio de motores que al configurarlos hacían funcionar al robot saltarín

Crea tu propia página web con Webador